|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Samopřeprogramovatelné mechanické metamateriály
Petr Panchártek
Představte si, že se nacházíte v budoucnosti a jste členem posádky vesmírných kolonizátorů. Dostali jste za úkol vystavět útočiště pro nově příchozí lidi ze Země. Jenže se nacházíme v budoucnosti a technologie se vyvinula do takové míry, že se navržené konstrukce staví, mění, přesouvají anebo opravují samostatně. Co když to už není pouhá vize a systém měnícího se materiálu se stává realitou? Již dlouho se předpokládá, že všestranné programovatelné materiály se mohou překonfigurovat tak, aby se přizpůsobily měnícímu se použití v adaptivní infrastruktuře, průzkumu vesmíru, reakci na katastrofy atd. V tomto bulletinu se dozvíte o robotickém konstrukčním systému jakožto implementaci programovatelné hmoty s mechanickým výkonem a měřítkem na úrovni konvenčních vysoce výkonných materiálů a příhradových systémů. Kompozitní příhradové stavební bloky vyztužené vlákny vytváří pevné, tuhé a lehké konstrukce s vlastnostmi mechanických metamateriálůMetamateriál – umělá struktura, která se v přírodě nevyskytuje a vykazuje atypické elektrické, magnetické a akustické vlastnosti, například permitivitu, permeabilitu, index lomu, akustickou propustnost a další. Vlastnosti metamateriálů bývají zpravidla silně závislé na frekvenci, takže výhodné vlastnosti pro určité technologie existují jen v úzkém pásmu frekvencí..
Dva typy mobilních robotů operují nad povrchem a komunikují s vnitřkem systému. Provádějí přepravu, umístění a reverzibilní upevnění stavebních bloků ve tvaru mřížek, jejichž periodická struktura je vhodná pro indexování a metrologii. Návrh systému využívá algoritmy programovatelné hmoty ke škálování velikosti a složitosti a umožňuje robustní kolektivní automatizovanou montáž a rekonfiguraci velkých struktur pomocí jednoduchých robotů. S jednoduchými roboty lze dosáhnout velkou konstrukční výkonnost (na jednotku hmotnosti) a konkurenceschopnou propustnost. Systém demonstruje potenciál seberekonfigurace autonomních metamateriálůMetamateriál – umělá struktura, která se v přírodě nevyskytuje a vykazuje atypické elektrické, magnetické a akustické vlastnosti, například permitivitu, permeabilitu, index lomu, akustickou propustnost a další. Vlastnosti metamateriálů bývají zpravidla silně závislé na frekvenci, takže výhodné vlastnosti pro určité technologie existují jen v úzkém pásmu frekvencí. pro různé aplikace.
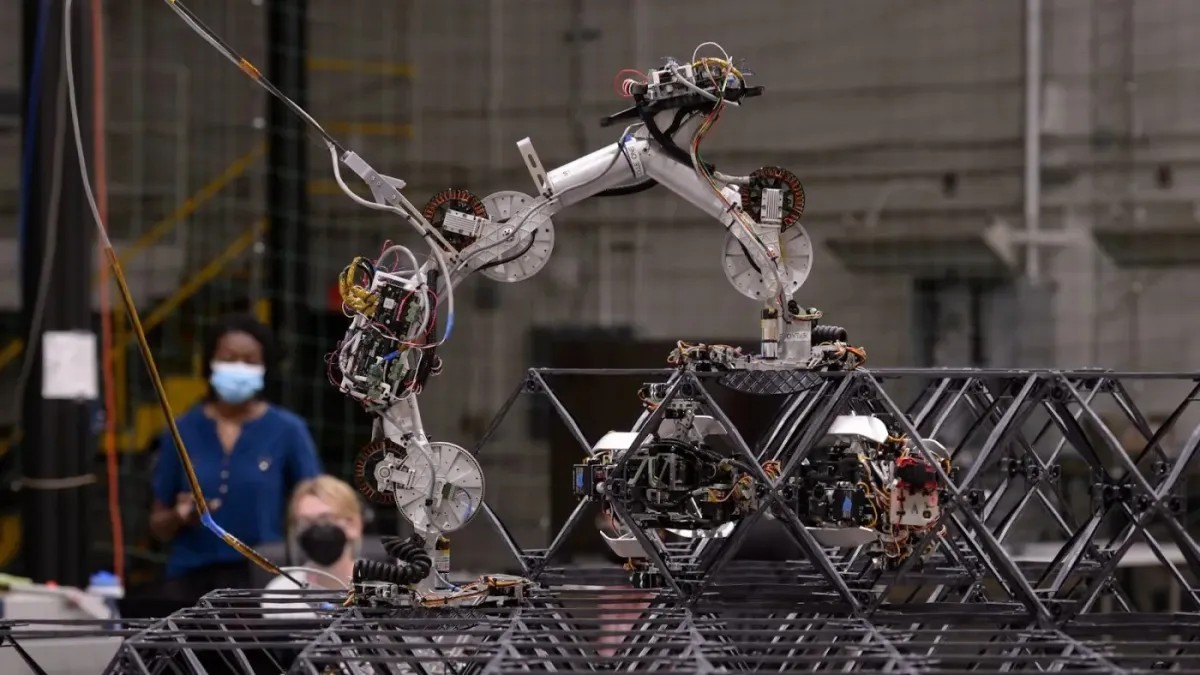
Roboti sestavují kompozitní stavební bloky do výsledné
struktury.
Zdroj: NASA/Dominic Hart.
|
Kuboktaedr – mnohostěn s 8 trojúhelníkovými plochami a 6 čtvercovými plochami. Kuboktaedr má 12 identických vrcholů, v každém se setkávají 2 trojúhelníky, 2 čtverce a 24 stejných hran, z nichž každá odděluje trojúhelník od čtverce. Metamateriál – umělá struktura, která se v přírodě nevyskytuje a vykazuje atypické elektrické, magnetické a akustické vlastnosti, například permitivitu, permeabilitu, index lomu, akustickou propustnost a další. Vlastnosti metamateriálů bývají zpravidla silně závislé na frekvenci, takže výhodné vlastnosti pro určité technologie existují jen v úzkém pásmu frekvencí. Voxel – Volumetric Element, označuje element objemu představující hodnotu v pravidelné mřížce třídimenzionálního (3D) prostoru. Jde vlastně o analogii k pixelu, který reprezentuje hodnotu v 2D mřížce. Stejně jako pixel je perfektní čtverec, voxel je perfektní krychle. |
Programovatelná hmota
Již delší dobu se inženýři snaží navrhnout samomontovatelné a rekonfigurovatelné stroje, které mají schopnost přizpůsobit své vlastnosti a formu měnícím se potřebám, způsobu použití nebo změnám prostředí. Vzhledem k tomu, že je lze znovu použít a opravit, mohly by takové systémy změnit životní cykly materiálu pro udržitelnější inženýrský svět a umožnit nová inženýrská paradigmata pro průzkum vesmíru s téměř zanedbatelnou hmotností komponent. Pokrok v materiálové vědě lze ukázat na programovatelných materiálech založených na fononických krystalechFononický krystal – periodická struktura zabraňující v daném kmitočtovém pásmu vniknutí zvukových vln., metamateriálechMetamateriál – umělá struktura, která se v přírodě nevyskytuje a vykazuje atypické elektrické, magnetické a akustické vlastnosti, například permitivitu, permeabilitu, index lomu, akustickou propustnost a další. Vlastnosti metamateriálů bývají zpravidla silně závislé na frekvenci, takže výhodné vlastnosti pro určité technologie existují jen v úzkém pásmu frekvencí. měnících barvu nebo samoskládacích površích. K realizaci trojrozměrných (3D) aplikací v makroměřítku, jako je adaptivní infrastruktura, vesmírné aplikace, reakce na katastrofy a další, jsou zapotřebí programovatelné materiálové systémy, které dokážou překonfigurovat svůj tvar a splňují požadavky na vysoký mechanický výkon v tahu i tlaku.
Systém kombinuje žádoucí vlastnosti a kolektivní robotickou montáž, teorii a algoritmy programovatelné hmoty a architekturu buněčných struktur pevných látek za účelem vytvoření samopřeprogramovatelného příhradového systému. Termín „programovatelná hmota“ se v literatuře používá k popisu široké škály systémů s velmi odlišnými vlastnostmi, od fononických krystalůFononický krystal – periodická struktura zabraňující v daném kmitočtovém pásmu vniknutí zvukových vln. až po rekonfigurovatelné cihly.
V duchu obecných makroměřítek 3D rekonfigurovatelných materiálů rozlišujeme příklady programovatelných materiálů, které jsou plně 3D, na „samoprogramovatelné“ a „přeprogramovatelné“:
Samoprogramovatelné materiálové systémy definujeme jako systémy, které se mohou překonfigurovat pomocí pohonů, metrologie a referenčních rámců, které jsou tomuto systému vlastní. Tyto systémy nejsou samopřeprogramovatelné, spoléhají na externí ovládání, metrologii nebo referenční rámce (jako jsou robotické nebo portálové systémy, které se při přeprogramování prvků spoléhají na globální metrologii a referenční rámce).
Přeprogramovatelné nazýváme systémy, které lze po počáteční výrobě překonfigurovat. Je to výhodnější, než aby měl pevné chování nebo konfiguraci z počátečního naprogramování.
Samopřeprogramovatelné jsou rekonfigurovatelné systémy, které spoléhají pouze na vnitřní ovládání a metrologii. Mají významné výhody ve škálovatelnosti systému a opravě chyb. Umožňují efektivní využití teorie a algoritmů programovatelné hmoty.
Poznámka: Omezujeme se na 3D systémy s nenulovou pevností v tlaku a v tahu. Umístění nebo rekonfigurace nespojených cihel se nebere v úvahu, protože nemohou být překonfigurovány tak, aby vydržely zatížení v tahu.
Samopřeprogramovatelný systém
Oblasti seberekonfigurovatelných robotů a kolektivní robotické konstrukce vedou k plné 3D samopřeprogramovatelnosti, ale otevřené výzvy zůstávají v oblastech škálovatelnosti a mechanického výkonu. Současné samopřeprogramovatelné materiály často spoléhají na magnetické spoje pro vyrovnání a přídržné síly, které mají nedostatečnou hustotu pevnosti k zajištění vysoce výkonných konstrukčních spojení. Návrhy systémů pro montáž pomocí robotů na příhradových konstrukcích mají velmi velký potenciál.
Samopřeprogramovatelný systém kombinuje mechanické metamateriálové stavební bloky a dva typy robotů k vytvoření rekonfigurovatelného strukturně-robotického systému. Ovládací a konstrukční komponenty jsou odděleny, aby se dosáhlo hmotnostní účinnosti systému na stejné úrovni, jakou mají statické konstrukční materiály. Každá strukturní buňka nazývaná voxelVoxel – Volumetric Element, označuje element objemu představující hodnotu v pravidelné mřížce třídimenzionálního (3D) prostoru. Jde vlastně o analogii k pixelu, který reprezentuje hodnotu v 2D mřížce. Stejně jako pixel je perfektní čtverec, voxel je perfektní krychle. (objemový pixel), je mechanický metamateriálový stavební blok, který je hromadně vyráběn z vysoce výkonných kompozitních materiálů vyztužených vlákny. Tyto stavební bloky lze použít k dosažení široké škály materiálových vlastností díky variabilitě kombinací základního materiálu a geometrie. Jednodušší roboti využívají pasivní funkce k pohybu po struktuře a indexování každé základní buňky, čímž dosahují vysoce přesné lokomoce v rámci místního referenčního systému s nízkými požadavky na robotické snímání a řízení. Nejsou používány žádné systémy vidění nebo externí metrologické systémy. Princip založený na voxelech a robotech zajišťují, že se každý voxel správně zarovná s druhým, což poskytuje robustní rekonfiguraci a sestavení konstrukce. Funkčnost a design konstrukce a robotů jsou tak úzce propojeny, že si roboti bez konstrukce zachovávají jen malou funkčnost a skutečně tvoří společný roboticko-konstrukční systém, který přesunuje složitost autonomní robotické konstrukční sestavy z hardwaru na software (plánovací a rozvrhovací algoritmy bez komplexní potřeby vnímání).
Animace práce robota sestavujícího prototyp. Zdroj: SciTechDaily.
Systémové komponenty
Konstrukční prvek (voxel)
KuboktaedrovéKuboktaedr – mnohostěn s 8 trojúhelníkovými plochami a 6 čtvercovými plochami. Kuboktaedr má 12 identických vrcholů, v každém se setkávají 2 trojúhelníky, 2 čtverce a 24 stejných hran, z nichž každá odděluje trojúhelník od čtverce. strukturní jednotkové buňky (voxelyVoxel – Volumetric Element, označuje element objemu představující hodnotu v pravidelné mřížce třídimenzionálního (3D) prostoru. Jde vlastně o analogii k pixelu, který reprezentuje hodnotu v 2D mřížce. Stejně jako pixel je perfektní čtverec, voxel je perfektní krychle.) jsou zkonstruovány ze šesti čtvercových ploch, které jsou vyrobené ze vstřikovaného sekaného polymeru vyztuženého uhlíkovými vlákny (Stat-Tech NN-40CF). Čtvercové plochy jsou předem smontovány do voxelů pomocí konvenčních šroubovacích čepů a integrovaných prvků pro zarovnání umístěné v rozích ploch. Roboti spojují voxely lícem k sobě pomocí čtyř vstřikovaných oboustranných spojovacích prostředků. O-kroužky mezi upevňovacím prvkem a lícem voxelu zajišťují, že předinstalované upevňovací prvky jsou během manipulace drženy v otevřené poloze. S upevňovacími prvky manipuluje robot se svými koncovými efektory. Pokud jsou uzamčeny, nesou tahové zatížení přibližně 800 newtonů.
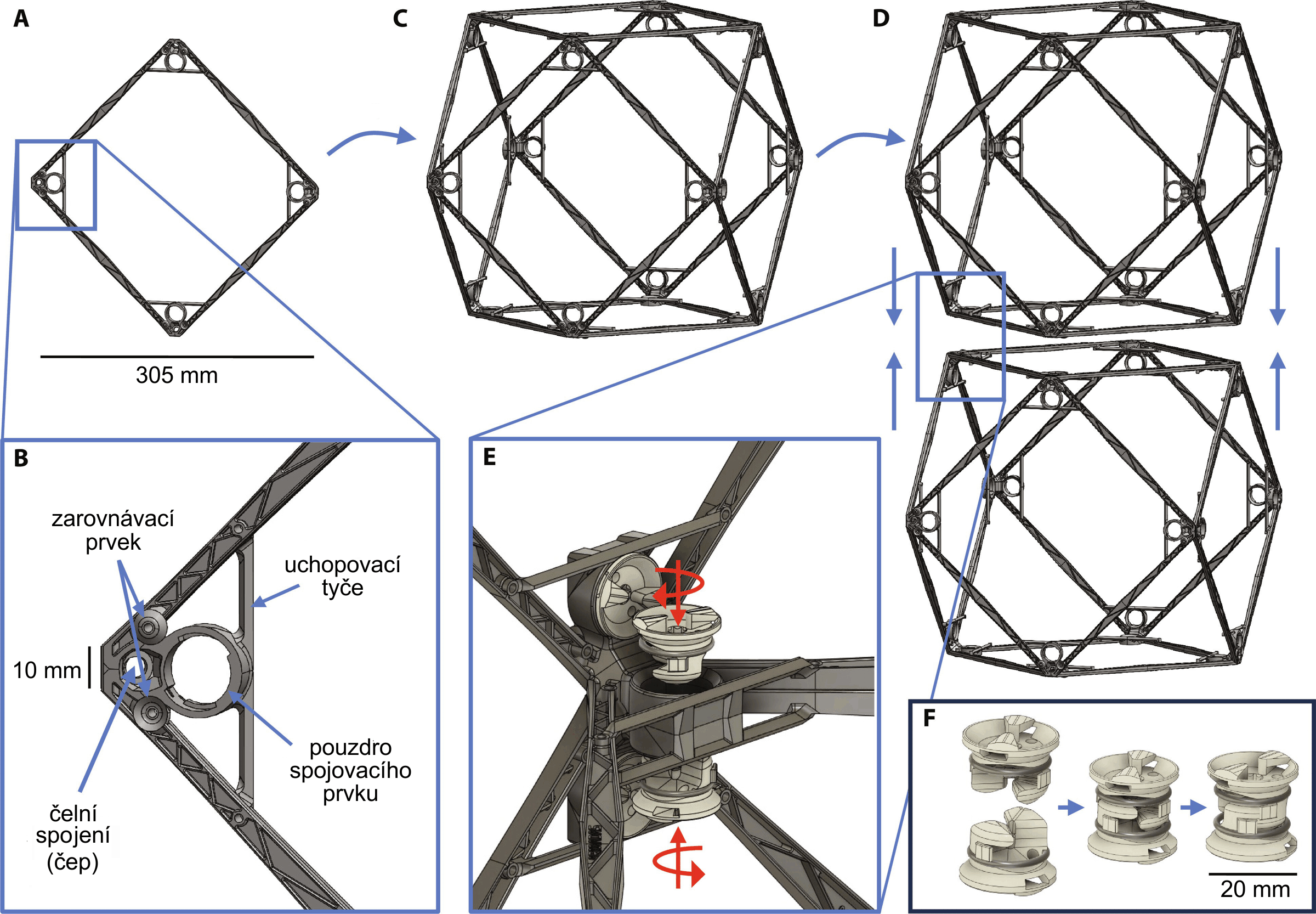
Přehled konstrukčního systému. (A) Jednotlivé vstřikované plochy mají prvky pro zarovnání mezivoxelového spojení a pro uchopení robotem (B). Do kuboktaedrové jednotky (C) je sestaveno šest ploch. Líce jednotek (D) jsou spojeny pomocí čtyř fixačních a oboustranných spojovacích prvků (E a F). Ohraničujícím rámečkem výsledného voxelového stavebního bloku je krychle s délkou stran přibližně 30 cm. Zdroj: Science Robotics.
Vnější (transportní) roboti
Na doručování voxelů ze zásobovacího skladu (zdroje voxelů) spolupracují dva vnější transportní roboti a umísťují voxely na určené místo. Každý transportní robot funguje jako píďalka se třemi hlavními hnacími klouby a dvěma nohama (připomínajícími „chapadla“). Chapadlo robota má schopnost se zarovnat a uchopit voxelové plochy. Robot má pro každé z chapadel dva rotační stupně volnosti vzhledem k základně (pohony stáčení). Robot používá pro zarovnání svých pohyblivých okrajů s voxelem vodítka (připomínají „okvětní lístky“) a během uchopování trny (připomínají „drápy“). Každý transportní robot plní jednu ze dvou rolí, označovaných jako „nákladní“, nebo „jeřábová“ služba:
Nákladní robot má třetí chapadlo („nákladní chapadlo“), kterým drží voxel při svém pohybu po konstrukci. Aby se přepravní robot mohl pohybovat, chytí se jedním chapadlem ke konstrukci, zatímco druhým se posune k blízkým voxelovým plochám na stejné úrovni, o jednu úroveň níže, nebo o úroveň výše, přičemž v těchto konfiguracích střídá vždy stavy chapadel tak, aby se mohl volně pohybovat po stupňovitém povrchu.
Jeřábový robot může vyložit voxel z nákladního chapadla a umístit (nebo odebrat) voxel v jakékoli dostupné poloze mřížky. Dokáže to pomocí jednoho ze svých chapadel (koncového efektoru), které se chová jako mobilní robotické rameno.
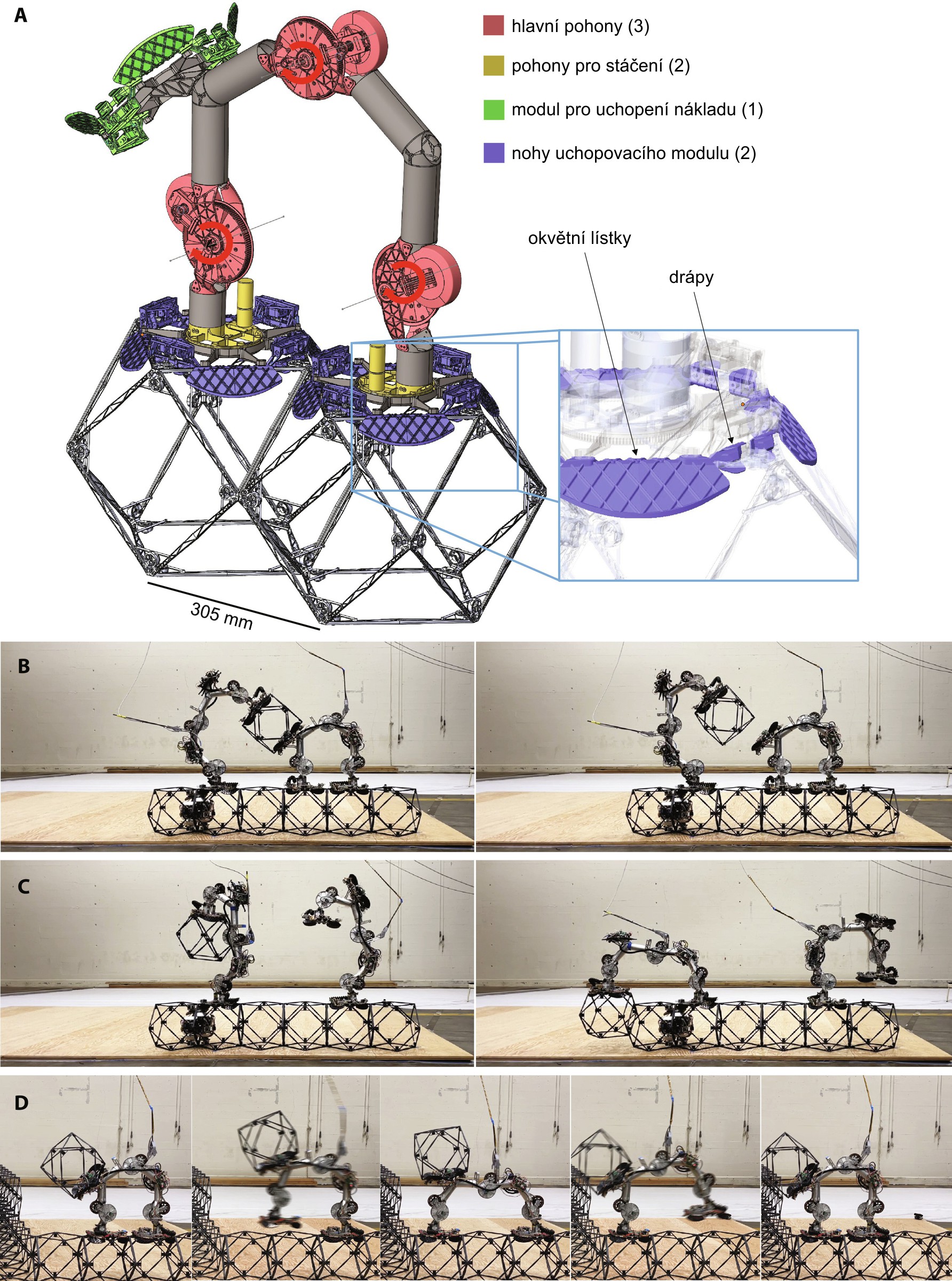
Vnější transportní robot. (A) Robot má tři hlavní pohony a dva pohony pro stáčení pohybu. Tři moduly chapadel, jeden pro náklad a dva pro pohyb, umožňují robotu přenášet voxely a uchopit konstrukci. Uchopovací moduly mají čtyři okvětní lístky a každý má čtyři drápy, které pomáhají se zarovnáním během uchopení voxelu. (B) Dva roboti fungují jako tým a předávají si voxely – jeřábový robot (vlevo) vyjme voxel z nákladního robota (vpravo). (C) Jeřábový robot umístí voxel. (D) Oba roboti procházejí celou strukturou jako píďalka. Zdroj: Science Robotícs.
Vnitřní (upevňovací) roboti
Vnitřní upevňovací robot prochází konstrukcí a aktivuje uchycené upevňovací prvky mezi voxely. Ve stažené poloze robot zaujímá čtvercovou plochu kuboktaedrické mřížky. Vysouváním a uchopením sousedních ploch se robot plochami pohybuje ve třech rozměrech. Dvouúčelové vyrovnávací prvky na těle robota (lyže) a chapadla (drápy) zajistí, že robot vždy vyrovná neupevněný voxel a spáruje zarovnanou plochu tak, že uchopí nově umístěný voxel. Jakmile jsou oba líce sevřeny drápy, neupevněný voxel se zarovná k již zafixovanému voxelu. Ve stažené poloze robot uchopí čela dvou voxelů a osm „šroubovacích“ modulů aktivuje upevňovací čepy na rozhraní mezi voxely – jednotky pro montáž nebo demontáž se buď připojí, nebo odpojí (pro rekonfiguraci, nebo opravu).
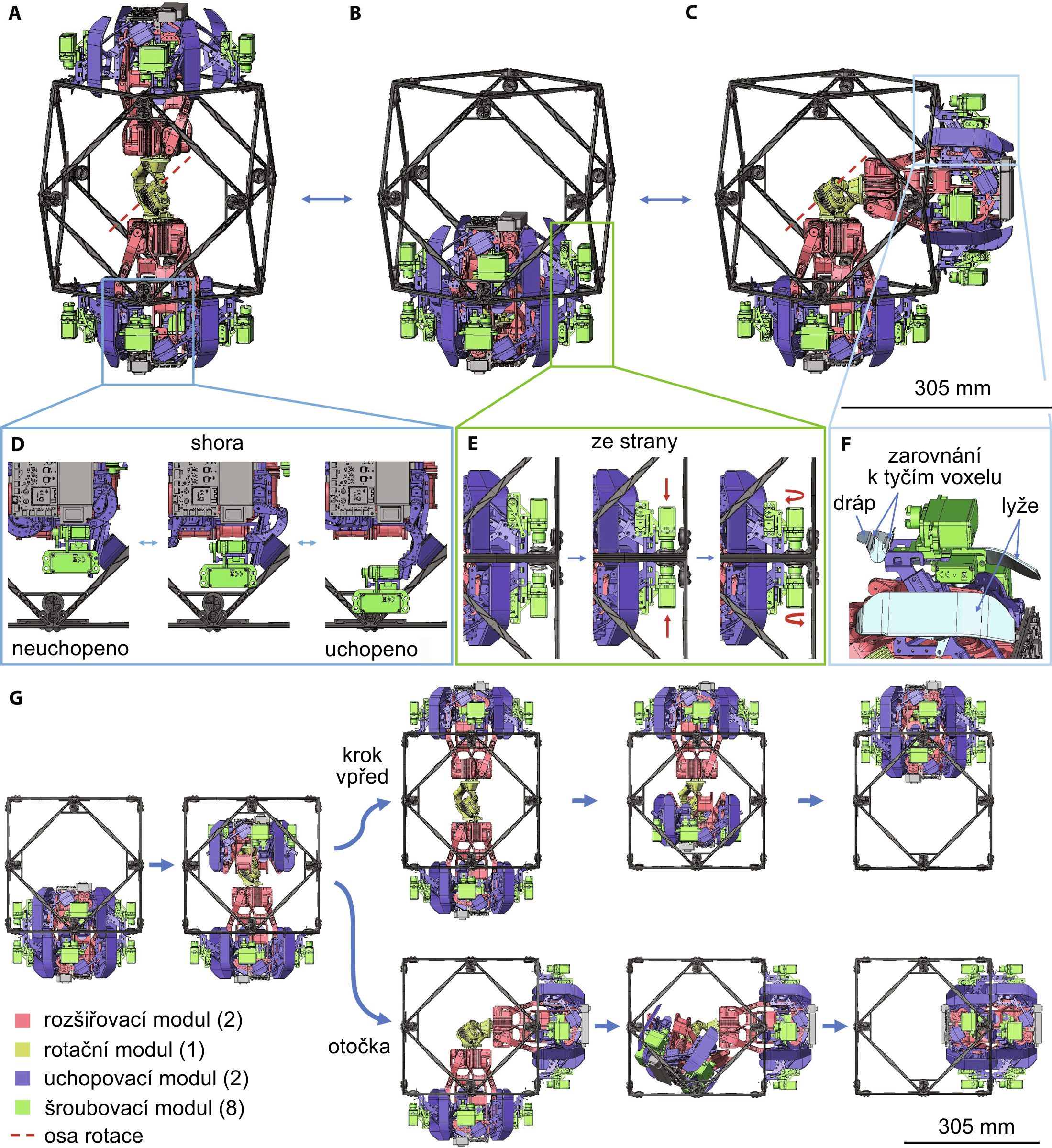
Vnitřní upevňovací robot. Robot při konstrukci používá dva rozšiřovací moduly, rotační modul k vysouvání (A), stahování (B) a otáčení (C). Uchopovací moduly (D) umožňují robotu uchopit sousední čela mřížky a moduly šroubů (E) umožňují robotovi aktivovat uchycené upevňovací prvky a spojovat sousední voxely. Vyrovnávací lyže a drápy jsou integrovány do uchopovacích modulů (F) pro pohyb a jemné polohování nově umístěného voxelu. Robot kombinuje řadu extenzí, kontrakcí a obratů, aby se přes mřížovou strukturu pohyboval mezi jednotlivými kuboktaedry (G). Zdroj: Science Robotics.
Obálka pro zachycení
Roboti mají vícestupňová zarovnávací vodítka, která spolu s ovladatelným robotem zajišťují správné a robustní umístění koncových efektorů. Při přesunu robota a uchopení voxelu dochází k asistovanému zarovnání. V počátečních fázích byla přesnost umístění/pohybu relativně nízká. Přesnost zlepšilo použití zarovnávacích vodítek v následujících fázích. Důvodem byla skutečnosti, že se „obálky pro zachycení“ systému s klesající velikostí překrývaly. Dokud bylo počáteční zarovnaní uvnitř původní obálky, bylo zaručeno, že následné fáze zarovnání zvýší přesnost polohování voxelů.
Když vnější robot udělal krok nebo uchopil voxel, aby ho umístil, okvětní lístky pro zarovnání mohly korigovat odchylku od roviny až 3,0 cm a nákladní chapadlo robota mohlo korigovat odchylku od uchopené plochy až o 1,34 cm. Během umísťování musel robot pro přepravu nákladu umístit voxel v rozmezí ±1,78 cm (ve všech osách) a ±3° od ideální polohy. Když se vnitřní robot pohyboval lícem, jeho zarovnávací lyže se mohly přizpůsobit až o ±1,78 cm od plochy voxelu, kterou se pohyboval. Při plném vytažení lyží bylo možné dosáhnout ve dvou osách zarovnání s přesností lepší než 0,1 mm. Při vysunutí vnitřního chapadla robota se vyrovnávací drápy mohly vypořádat s odsazením až 1,3 cm od roviny a při následném přitažení dvou voxelů k sobě se zajistilo při plném sevření umístění s odchylkou menší než 0,1 mm. Aktivací spojovacího prvku bylo mezi stěnami dosaženo předpětí, které vyrovnalo nesouosost až o 0,2 cm. Utažení upevňovacího prvku vedlo k zatížení zarovnávacích prvků na plochách voxelů, které sloužily jako polohové spojení s opakovatelností v rámci teplotních rozměrových změn ploch voxelů v laboratorním prostředí. Tyto spojovací systémy byly dostatečně tuhé, takže způsobovaly elastické průměrování v rámci rozhraní voxel-voxel a napříč sestavami. To poskytlo celkovou rozměrovou přesnost v rámci výše uvedených teplotních změn pro sestavy jakékoli velikosti.
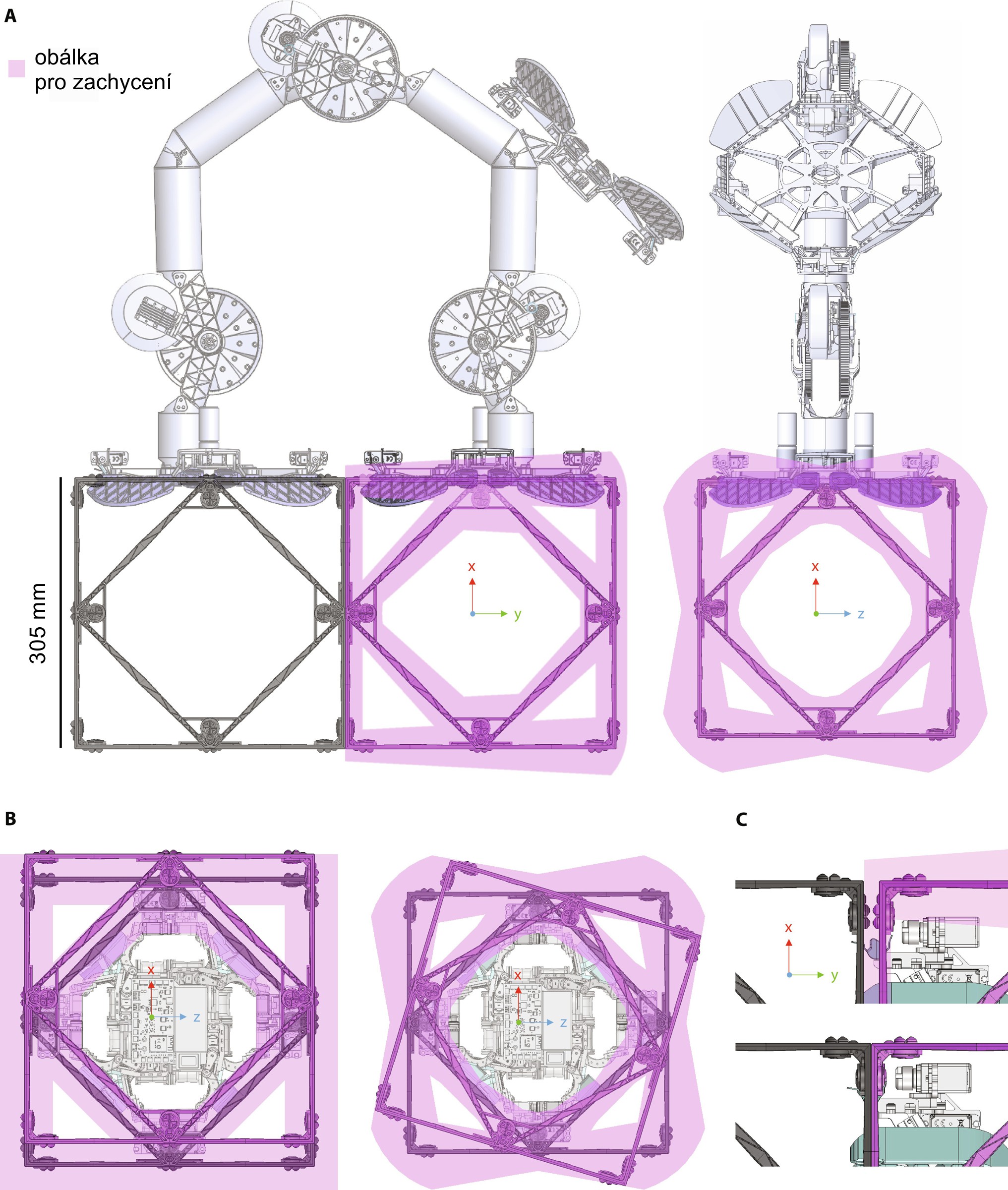
Požadavky na zarovnání a obálka pro zachycení. Roboti používají zarovnávací vodítka, která jim pomáhají umístit, zarovnat a upevnit nové voxely. Obálky pro zachycení se při umísťování voxelů mohou dostat mimo osu, což mohou vodítka opravit a přizpůsobit. (A) Obálka pro zachycení k následnému umístění voxelů. Když se upevňovací robot pohybuje směrem do stěny voxelu znázorněného na (B), jeho lyže se přizpůsobují translačním i rotačním odchylkám v rovině voxel-voxel. Upevňovací robot uchopí drápy voxel pro konečné zarovnání a sníží nesouosost v kolmém směru na hodnotu nižší než 0,2 mm. Zdroj: Science Robotics.
Laboratorní konstrukční test
V laboratorním experimentu samostatně sestavili dva transportní roboti a jeden upevňovací robot konstrukci úkrytu složenou z 256 voxelů. Struktura úkrytu byla navržena tak, aby ukázala schopnost celého systému vytvářet převislé geometrie. Sestavení začalo z pětivoxelové „zárodečné“ struktury, která sloužila jako výchozí bod pro roboty. Voxely byly ručně nakládány do nákladního chapadla transportního robota, který pak voxely přepravoval na stavbu. Tam jeřábový transportní robot odebral naložený voxel z nákladního transportního robota a umístil jej do správné polohy v konstrukci. Jakmile se upevňovací robot dostavil na své místo, provedl konečné zarovnání a připojil ke stávající konstrukci novou buňku. Plán stavby byl vygenerovaný ručně, obsahoval samotný požadavek na sestavení stavby z voxelů a plány cesty robota, které byly příkazy odesílány bezdrátově přes centralizovaný ovladač. Ke kontrole stavebního plánu, kolizí robota a konstrukce byl použit simulátor.
Numerická simulace při celkové kontrole stavebního plánu,
kolizí robota a konstrukce. Zdroj:
MIT/CBA, NASA/ARC, TechXplore.
Operátoři neposílali žádné příkazy (kromě příkazů o opakování a restartování provozu v případě, že došlo k poruše), byli přítomni pouze u plánovaných odstávek a při monitorování poruch. Řídicí systém posílal jen primitivní příkazy představující diskrétní akce, jako je „krok vpřed“, „krok nahoru“ nebo „otočte se o 90° doprava“. Roboti poté prováděli předem stanovené pohybové rutiny (uložené lokálně v robotovi) s minimálním snímáním zpětné vazby. U transportních robotů se snímání provádělo pomocí koncových spínačů polohy nožního chapadla, snímání proudu motoru (motory otáčení a chapadla) a snímače polohy hlavního pohonu. Každý kloub obsahuje enkodér na výstupu motoru a na výstupu kloubu pro ozubení rozvodového řemene. Snímání na upevňovacím robotu zahrnuje kodér pro sledování polohy motoru s centrální rotací, koncový spínač stažené polohy, inerciální měřicí jednotku (IMU) a monitorování elektrického proudu servomotoru.
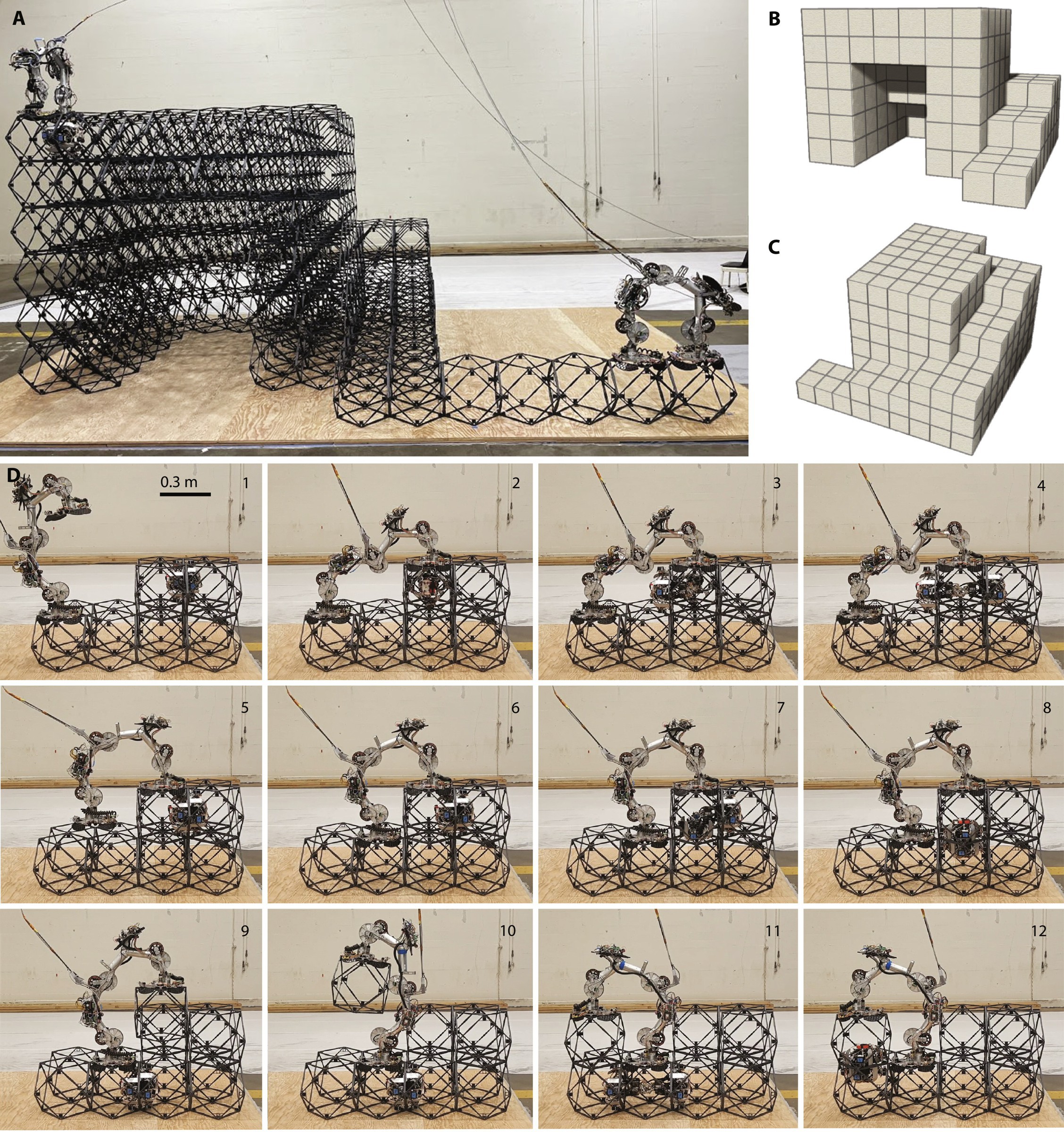
Experiment sestavení 256 voxelů a experiment rekonfigurace. (A) Dokončena stavba úkrytu s 256 voxely. Tento příklad struktury ukazuje schopnost celého systému vytvářet převisy. Přední izometrický pohled (B) a zadní izometrický pohled (C) na digitální model hotové konstrukce (D). Časová posloupnost obrázků ukazuje transportního a upevňovacího robota, jak oddělují základní buňku od stávající struktury (1 až 9), přemisťují ji na novou pozici (9 až 11) a poté ji znovu připojují ke konstrukci (12). Příkazy byly odesílány bezdrátově přes centralizovaný ovladač. Fyzická kabeláž s vnějším robotem umožňovala pouze napájení bez jakékoli komunikace. Zdroj: Science Robotics.
Dokončení stavby z 256 voxelů trvalo celkem 4,2 dne nepřetržitého provozu, což odpovídá rychlosti montáže 20 000 mm3/s. Každý robot úspěšně provedl tisíce autonomních operací, včetně pohybu, umístění voxelů a šroubování upevňovacích čepů. Ujetá vzdálenost se lišila podle role robota, protože upevňovací a jeřáboví roboti primárně zůstávaly v přední části stavby. Robot pro přepravu nákladu ujel 4 624 délek svého těla (3,15 km), robot pro přepravu jeřábu ujel 522 délek svého těla (0,356 km) a upevňovací robot ujel 754 délek svého těla (0,230 km). Posun byl spočten z pohybu těžiště každého robota, vypočítaného z každého jeho primitivního pohybu.
Oba typy robotů byly schopny monitorovat své operace a detekovat chyby během stavby. Roboti upozornili operátora na každou poruchu, která pozastavila provoz, a roboti museli čekat na další pokyny. Operátor buď vyřešil problém vzdáleně (obnovení bez dotyku), nebo ručně odstranil poruchu dotykem před opětovným spuštěním autonomního provozu.
Přehled výsledků. Zdroj: NASA Ames Research Center, Coded Structures Lab.
Závěr
Programovatelná hmota je konkurenceschopná pro vysoce výkonné inženýrské aplikace. Nabízí autonomní konstrukci a rekonfiguraci materiálů do různých užitečných tvarů. Systémy se vstřikovanými kompozity sekaných vláken jsou ekonomicky výhodným způsobem výroby voxelů, které dosahují výkonnostních parametrů užitečných pro vesmírné aplikace. Existuje však ještě mnoho metod, jak optimalizovat spoje a materiály a rozšířit konstrukční výkonnost systému. Zvýšeného výkonu lze dosáhnout použitím vysoce výkonných základních materiálů, jako jsou například uhlíková vlákna. Zvolená geometrie voxelů ve tvaru kuboktaedrové mřížky má příznivou kombinaci tuhosti a vlastností, které usnadňují jejich montáž (včetně vůlí pro robotické koncové efektory).
Levní roboti bývají relativně nepřesní, ale i tak v tomto systému dosahují velmi vysoké opakovatelnosti a konzistence montáže nebo rekonfigurace. Pro určení jejich stavu (senzory a výpočty) není potřeba ani přílišných zdrojů. Nízká cena nabízí možnost vytvořit systém s paralelními a redundantními roboty. Snadné přidávání robotů do systému zvyšuje i spolehlivost, protože algoritmická řešení mohou využít provozní rezervy v podobě množství robotů a konstrukčních součástí, aby se vyřešilo například selhání jednotlivých součástí. Budoucí vylepšení tohoto systému může stále využít integraci dodatečného snímání pro další zvýšení spolehlivosti, přidání různých typů monitorování stavu nebo jiných užitečných funkcí. Plně distribuované plánovací a rozvrhovací algoritmy mohou dosáhnout rozmanité funkčnosti i se skromnou senzorikou a komunikací pro běžné a diskrétní systémy (jako je tento).
Možnost rekonfigurace a demontáže umožňuje sestavení jakékoli cílové geometrie a poskytuje spolehlivé mechanizmy pro opravu chyb. Voxely a spojovací prvky jsou vhodné pro hromadnou výrobu o nízkých nákladech (7,43 USD na jednu vstřikovanou plochu kuboktaedru). Programovatelné materiálové systémy slibují všestrannost, robustnost a nízké náklady. Uvedení těchto systémů do každodenních infrastrukturních aplikací by mohlo změnit způsob, jakým žijeme, stavíme a přizpůsobujeme se měnícímu se klimatu.
* * *
„Rozdíl mezi málem a hodně je ten, že jedna cihla nestačí na stavbu budovy, ale když někomu spadne na hlavu, je to hodně.“
Jean Paul Friedrich Richter
Odkazy
- Christine E. Gregg et al.: Ultralight, strong, and self-reprogrammable mechanical metamaterials; Science Robotics 9/86, 17 Jan 2027
- Gianine Figliozzi: Robot Team Builds High-Performance Digital Structure for NASA; NASA, 17 Jan 2024
- David L. Chandler: MIT Assembler Robots Make Large Structures From Little Pieces – Could One Day Build Space Colonies; SciTechDaily, 16 Oct 2019
- David L. Chandler: Assembler robots make large structures from little pieces; TeXplore, 16 Oct 2019
- Wikipedie: Metamateriál
- Wikipedie: Voxel
- Wikipedia: Cuboctahedron
- YouTube: NASA Ames Space Robots Assembling Structures – ARMADAS; Robotics Nerd, 18 Jan 2024
- Ultrus Prospector: Stat-Tech™ NN-40CF/000 NH FRV0 Natural
![]()
![]()
