|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Inteligentní umělá paže
Petr Panchártek
Vědci ze Švýcarského federálního technologického institutu v Lausanne (EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa.) úspěšně testovali novou neuroprotetickou technologii, která kombinuje robotické a uživatelské ovládání neuroprotéz, a otevírá tak cesty v nové mezioborové oblasti sdíleného ovládání pro neuroprotetické technologie.
Základní kostra protetické paže. Zdroj: Technology News and Markets.
|
EPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. Neuroprotetika – obor na pomezí neurovědy a biomedicínského inženýrství, který se zabývá vývojem nervových protéz (neuroptozéz). Tato vědecká a technologická disciplína se zaměřuje především na mozek a rozhraní počítače. Spojuje spíše mozek s počítačem než s daným zařízením, které má nahradit chybějící biologickou funkčnost. |
Spojení dvou různých oborů
Vědci z EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. vyvíjejí nové přístupy ke zlepšení robotických paží, zejména pro lidi s amputovanými končetinami. To vyžaduje nejen ovládání jednotlivých prstů, ale i automatizaci, která umožní lepší uchopení a manipulaci s předměty. Zkonstruovaná paže je výsledkem mezioborového spojení neuroinženýrství a robotiky. Úspěšně byla testována na třech lidech s amputovanými končetinami a na sedmi zdravých subjektech. Nová technologie spojuje dva koncepty ze dvou různých oborů. Jejich vzájemná implementace nebyla nikdy předtím využita při robotickém ovládání paží a přispívá k právě vznikajícímu oboru sdílené kontroly v neuroprotetice.
První koncept přináší neuroinženýrství: zahrnuje dešifrování zamýšleného pohybu prstu ze svalové aktivity pahýlu amputované končetiny a slouží pro individuální ovládání prstů protetické ruky. Druhý koncept přináší robotika: umožňuje robotické paži zachytit objekty, uchopit je a udržovat s nimi kontakt. Když například držíte v ruce předmět a začne klouzat, máte jen několik milisekund na uchopení – tak dlouho trvá mozku, než si uvědomí, že objekt skutečně uklouzává. Robotická ruka má schopnost reagovat do 400 milisekund. Vybavená je po celé délce tlakovými senzory, dokáže reagovat a stabilizovat předmět.

Inteligentní umělá ruka pro lidi s amputovanými končetinami. Zdroj: Silicon Review.
Jak sdílené ovládání funguje?
Algoritmus se nejprve učí, jak dekódovat úmysl uživatele a převede jej do pohybu prstů protetické paže. Člověk s amputovanou končetinou musí provést řadu pohybů rukou, aby vyškolil algoritmus, který používá strojové učení. Senzory umístěné na pahýlu amputované končetiny detekují svalovou aktivitu a algoritmus zjistí, které pohyby rukou odpovídají konkrétnímu charakteru této svalové aktivity. Jakmile jsou pochopeny všechny pohyby prstů zamýšlené uživatelem, pak lze tyto informace využít k ovládání jednotlivých prstů protetické ruky.
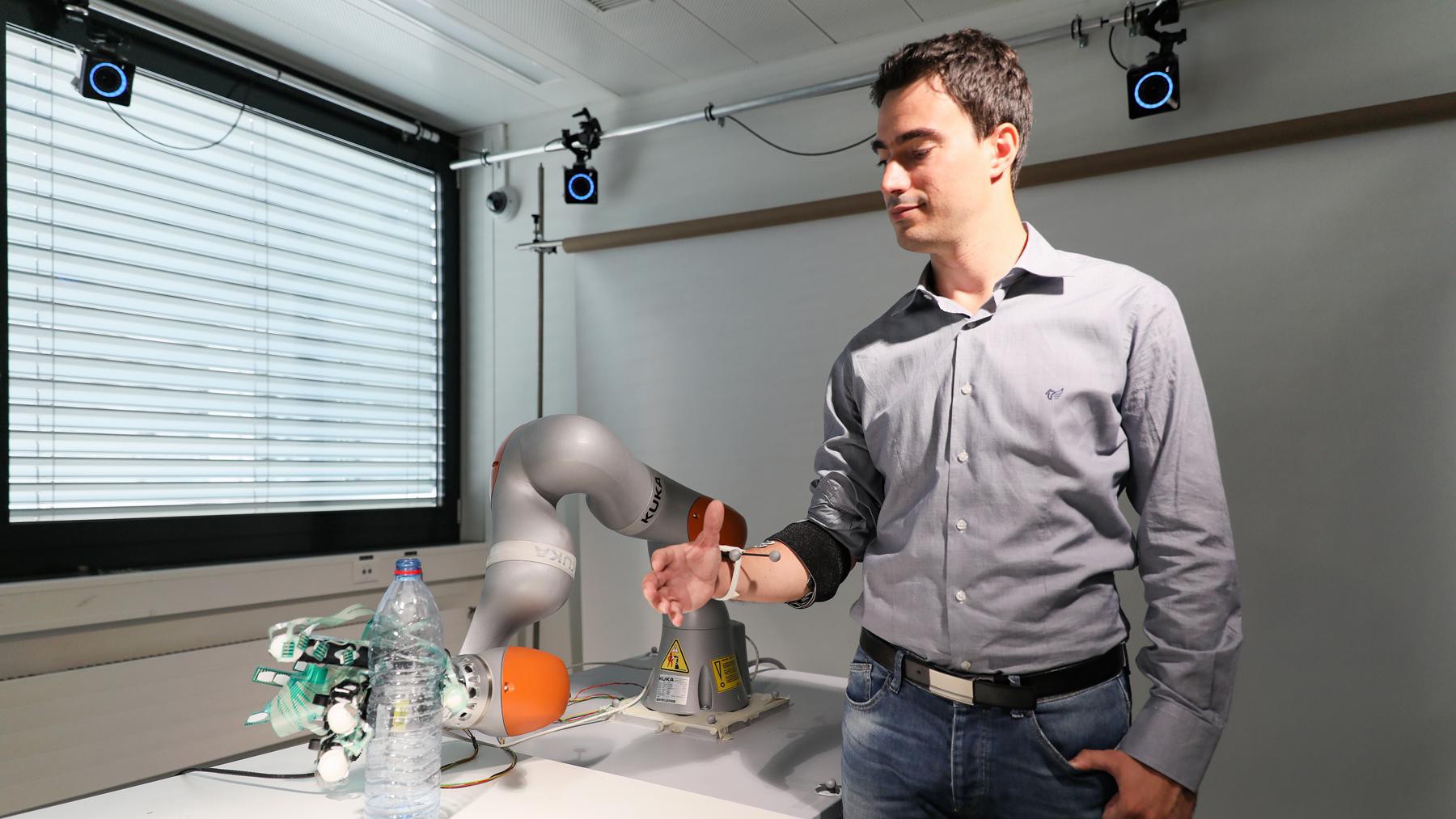
Artoni Fiorenzo zkouší sdílenou kontrolu s robotickou paží.
Zdroj: EPFL, Alain Herzog (2019).
Vzhledem k tomu, že svalové signály mohou mít různou úroveň šumu, je nutný algoritmus strojového učení, který z těchto signálů extrahuje smysluplnou aktivitu svalů a správně ji interpretuje do pohybů. Vědci dále navrhli algoritmus tak, aby se robotická automatizace aktivovala, když se uživatel snaží uchopit předmět. Algoritmus říká protetické paži, aby sevřela prsty, když je daný objekt v kontaktu se senzory umístěnými na povrchu protetické paže. Toto automatické uchopení je převzato a upraveno z předchozí studie robotických paží, která se zabývala zjištěním tvaru objektů a jejich možným uchopením jen na základě hmatových informací, tj. bez pomoci vizuálních signálů.
Zbývá ještě mnoho úsilí k tomu, aby byl algoritmus plně funkční. Teprve pak ho bude možné implementovat do komerčně dostupné protetické paže pro lidi s amputovanými končetinami. Algoritmus je prozatím testován na robotu poskytnutém externí stranou. Sdílený přístup k ovládání robotických paží zvyšuje klinické využití a užitečnost těchto zařízení. Může být použit v různých neuroprotetických aplikacích, jako jsou například bionické protézy rukou, které jsou založené na komunikaci mozku se strojem.
Testy protetické ruky v laboratoři EPFL. Zdroj: EPFL.
Odkazy
![]()
![]()
