|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Kam dron nemůže, nastrčí kolibříka
Petr Panchártek
Co může létat jako pták a zároveň se vznášet jako hmyz? Přátelští kolibříci. Kdyby drony měli obdobnou schopnost, mohli by lépe manévrovat v prostředí zřícených budov a v jiných zaplněných prostorách při hledání uvězněných obětí. Vědečtí pracovníci z Purduovy univerzity vyvinuli létající roboty, kteří se chovají jako kolibříci. Jsou vycvičeni pomocí počítačových algoritmů založených na různých technikách, které pták používá každý den zcela přirozeně.
Vědci z Purduovy univerzity vytváří robotické kolibříky, kteří se z počítačových simulací učí, jak létat jako skutečný kolibřík. Robot je uzavřen v ozdobném pouzdře. Zdroj: Purduova univerzita.
|
Čeleď kolibříkovitých – Trochilidae, čeleď pestře zbarvených ptáků z řádu svišťounů. Mají dlouhý trubičkovitý zobák. Jsou nejmenšími ptáky světa. Nejmenší druh kolibříka má tělo 2,8 cm dlouhé a hmotnost 1,8 g. Známo je celkem 319 druhů. 6 druhů je kriticky ohroženo vyhubením. Žijí v tropech Jižní a Střední Ameriky. Živí se nektarem květů a drobným hmyzem. V letu se dovedou udržet (třepotat) na místě. Žijí v malých hnízdech, která jsou pevně připojena k větvím. Kalypta nejmenší – Mellisuga helenae (angl. Bee Hummingbird), řád Apodiformes (svišťouni), čeleď Trochilidae (kolibříkovití). Nejmenší pták na světě. Dospělý jedinec měří 5 centimetrů a váží pouhých 8 gramů. Průměrné rozpětí křídel je 3,25 cm. Nejmenší jsou pak i snesená vejce, která jsou menší než zrnko kávy. Vyskytují se na Kubě a ostrově Isla de la Juventud, pozorováni byly též na sousedních ostrovech Jamajka a Haiti. Nanokolibřík – Nano Hummingbird, produkt firmy Aero Vironment – bezpilotní letadélko vyrovnávající se vzhledem a leteckými schopnostmi kolibříkům. Předpokládá se jeho využití ke špionážním účelům. AeroVironment – americká společnost se sídlem ve dvou kalifornských městech (Simi Valley a Monrovii), která se zabývá vývojem elektrických systémů, zejména malých létajících dronů. Společnost byla založena v roce 1971 a v současnosti velmi úzce spolupracuje se společností Lockheed Martin. Purduova univerzita – americká veřejná univerzita, která byla založena v americké Indianě v roce 1869. Sídlem univerzity se stalo město West Lafayette. Je pojmenována podle filantropa a obchodníka Johna Purdue. Univerzita je zaměřena na inženýrství, zemědělství, letectví a informační technologie. V roce 1962 zde byla založena první fakulta informatiky na světě. Školu navštěvuje 40 000 studentů. |
Základem je biologie
Vědci se snaží už dlouhá léta dekódovat let kolibříků tak, aby roboti mohli létat i tam, kam ostatní vznášedla nemohou. V roce 2011 postavila společnost AeroVironmentAeroVironment – americká společnost se sídlem ve dvou kalifornských městech (Simi Valley a Monrovii), která se zabývá vývojem elektrických systémů, zejména malých létajících dronů. Společnost byla založena v roce 1971 a v současnosti velmi úzce spolupracuje se společností Lockheed Martin. robota podobného kolibříkovi, kterého si objednala americká armádní agentura DARPA (Defense Advanced Research Projects Agency) (viz AB 9/2011). Robot byl však těžší než skutečný kolibřík a nebyl tak rychlý. Jeho řízení letu bylo podobné spíše helikoptérám a mohl jen omezeně manévrovat. To bohužel vyžadovalo, aby člověk byl neustále za dálkovým ovládáním.
Skupina profesorky strojírenství Xinyan Dengové na Purduově univerzitěPurduova univerzita – americká veřejná univerzita, která byla založena v americké Indianě v roce 1869. Sídlem univerzity se stalo město West Lafayette. Je pojmenována podle filantropa a obchodníka Johna Purdue. Univerzita je zaměřena na inženýrství, zemědělství, letectví a informační technologie. V roce 1962 zde byla založena první fakulta informatiky na světě. Školu navštěvuje 40 000 studentů. a její kolegové studovali kolibříky několik let v Montaně. Dokumentovali klíčové manévry kolibříků, jako je například rychlé otočení o 180 stupňů, a přeložili je do počítačových algoritmů, které by se robot mohl naučit, když se připojí k počítačové simulaciPočítačová simulace – napodobení skutečnosti pomocí numerického výpočtu, nezbytná součást modelování fyzikálních procesů. Dokáže na základě sofistikovaných algoritmů předpovědět jak kvantitativní, tak kvalitativní výsledky pokusů při různých počátečních podmínkách. Umožňuje omezit výběr jevů, které celý pokus ovlivňují nejvíce, a tím vysvětlit příčiny a podstatu procesů..

Robot společnosti AeroVironment. Zdroj: AeroVironment.

Fotografie kolibříků z expedice US 2017. Foto: Autor.
Aerodynamika je prostě jiná
Křídla kolibříků jsou velice odolná a kolibříci kupodivu nevyužívají konvenční aerodynamiku, jak ji známe. Profesorka Dengová poukázala na to, že klasická aerodynamika je ve své podstatě nestabilní, s vysokými úhly náběhu a vysokým zdvihem. Malá létající zvířata využívají poněkud jiné pohyby a jejich studium umožní zmenšit i mávající roboty s křídly.
Roboti by mohli klidně létat stejně jako skutečný kolibřík, této schopnosti by se hlavně využilo při záchranných operacích. Jejich pohyb zůstává stabilní díky turbulenci, kterou vědci demonstrovali testováním dynamiky zmenšených křídel v olejové nádrži.


Porovnání aerodynamiky drona (vlevo) a kolibříka (vpravo).
Klikněte pro
zobrazení animace. Zdroj: Wired.
Video zachycuje aerodynamiku mávajících křídel v olejové nádrži.
Zdroj: Purduova univerzita.
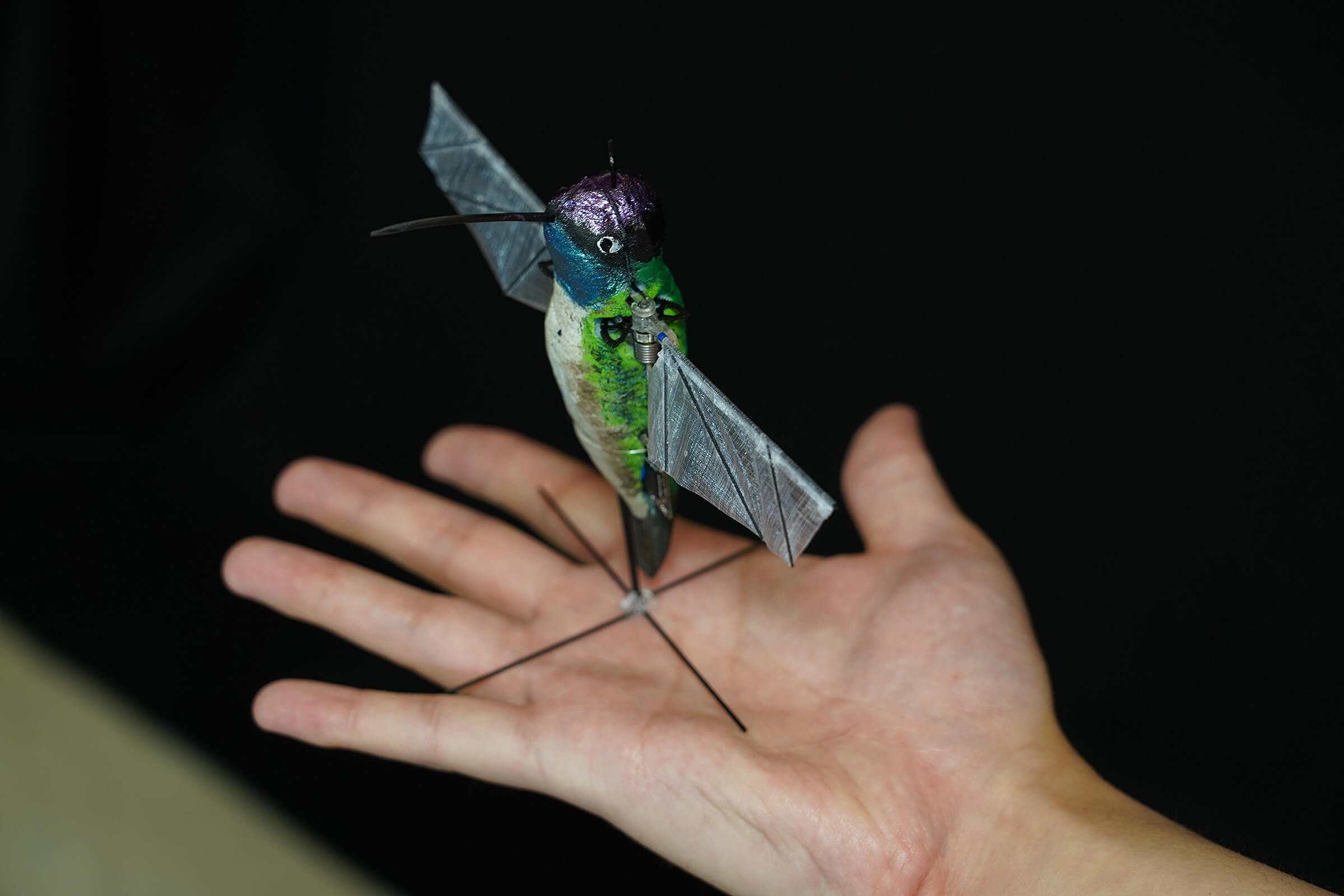
Robot kolibřík
K tomu, aby robot napodobil hbité pohyby, které provádějí zvířata při letu v přírodě, mu postačí jen dva motory ovládající obě křídla nezávisle na sobě. Návrh malých robotů s vyšším zdvihem dává vědcům možnost lépe využít konstrukční prostor, aby nakonec přidali baterii a snímací technologii, například fotoaparát nebo GPSGPS – globální polohovací systém, navigace pomocí družic umístěných na oběžné dráze Země. Oficiální název je NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Positioning System). Systém je vyvíjen 30 let a v roce 2007 byla na oběžné dráze umístěna již čtvrtá generace polohovacích družic.. V současné době musí být robot při letu připojen ke zdroji energie, ale to by nemělo dlouho trvat. Skutečný kolibřík má na to, aby mohl dělat výkonné a řídící tahy, více skupin svalů. Robot musí být zkonstruován tak, aby měl maximální výkon při minimální hmotnosti, a přitom zachoval co možná největší manévrovatelnost.

Tento robot kolibřík létá sám, zatímco je přivázán ke zdroji energie,
ale brzy bude napájen z baterií. Zdroj: Purduova univerzita.
Jsi kolibřík, jsi kolibřík…
Učení ze simulátoru znamená, že robot „zjistí“, jak se pohybovat samostatně a jak napodobit kolibříka. Příkladem může být rozhodující vlastnost, kdy provést úhybný manévr. Umělá inteligence kombinovaná s flexibilními křídly umožní robotovi naučit se nové triky. I přesto, že robot ještě nevidí, reaguje na náraz či jen letmý dotyk nějakého tělesa zvýšeným odběrem elektrického porudu. Počítač může změny proudu vyhodnocovat a robot může v podstatě vytvořit mapu, aniž by viděl okolí. To by mohlo být velmi užitečné v situaci, kdy robot hledá uvězněné oběti na tmavém místě. Pokud chceme, aby robot viděl, pak stačí přidat jen jeden senzor.
Klasické drony se, vzhledem k jejich aerodynamické složitosti, už nemohou dále zmenšovat. Pak by nebyly schopny generovat dostatečný tah ke zdvihnutí vlastní hmotnosti.
Animace zachycuje pohyb mávajících křídel robota kolibříka (vlevo)
se skutečným kolibříkem (vpravo). Zdroj: Purduova univerzita.
Čím menší, tím lepší…
Další studium fyziky hmyzu a kolibříků umožnilo vědcům z Purduovy univerzity postavit roboty menší než kolibříci – a dokonce tak malé jako hmyz – bez větších zásahů do způsobu, jakým létají. Čím menší je jejich velikost, tím větší je frekvence mávajících křídel, a tím účinněji létají. Roboti mají 3D tištěná těla, křídla jsou z uhlíkových vláken a laserem řezané membrány. Vědci postavili jednoho robota kolibříka o hmotnosti dvanáct gramů (hmotnost průměrného dospělého kolibříka) a dalšího robota velikosti hmyzu o hmotnosti jeden gram. Robot kolibřík může zvednout větší hmotnost, než je jeho vlastní (až do 27 gramů).

Nejmenší robot o velikosti hmyzu vyrobený na Purduově
univerzitě.
Zdroj: Purduova univerzita.
Závěr
Roboti kolibříci by nemuseli být nasazeni jen na pátracích a záchranných misích, ale také by mohli umožnit biologům studovat kolibříky v jejich přirozeném prostředí díky senzorům robota kolibříka. „Z biologie jsme se naučili stavět robota a nyní můžeme za pomocí těchto robotů uskutečnit další biologické objevy.“ Simulace této technologie jsou dostupné jako Open Source. Ostatní multimediální soubory lze nalézt ve složce Google Drive.
Odkazy
- Purdue University: Hummingbird robot uses AI to soon go where drones can't; Science Daily, 29 May 2019
- Purdue Technology Center Aerospace: Hummingbird robot using AI to go soon where drones can’t; 29 May 2019
- Matt Simon: Watch Air Swirl Around a Quadcopter Drone's Rotors; Wired, 24 Jan 2017
- Nick Stockon: Science Graphic of the Week: Hummingbird Wing Aerodynamics; Wired, 10 Jul 2014
- Wikipedia: AeroVironment Nano Hummingbird
- Aldebaran: Expedice US 2017
- Jiřina Scholtzová: Ptáček bonzáček; AB 9/2011
![]()
![]()
