|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Inteligentní mikroroboti
Petr Panchártek
Vědci z EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. a z ETHETH – prestižní švýcarská polytechnika, na které působil mj. Albert Einstein. Zkratka ETH znamená Eidgenössische Technische Hochschule (Spolková vysoká technická škola). Univerzita byla založena v roce 1855, nyní má dvě části: v Curychu (ETHZ) a v Laussane (ETHL). S univerzitou je spojeno 26 nositelů Nobelových cen. v Curychu vyvinuli malé elastické roboty, kteří mění svůj tvar v závislosti na okolním prostředí. Tvar robotů je inspirován mikroorganizmy a jsou plně biologicky kompatibilní s lidským organizmem. Tito roboti optimalizují své pohyby tak, aby se dostali do těžko přístupných oblastí lidského těla. Může to znamenat revoluci pro výrobu léků.
V roce 2014 vědci z curyšského ETH vymysleli mikroroboty, kteří jsou poháněni kroucením, něco jako umělý bičík. Vědci dokáží směrovat mikroroboty pomocí externích magnetických polí. Zdroj: PNAS.
|
Nanotechnologie – obor zabývající se aplikováním výsledků nanofyziky. Zkoumá možnosti, jak vytvářet zařízení molekulových rozměrů a jak manipulovat s jednotlivými atomy tak, aby se dosáhlo žádaných vlastností. Protože u zařízení vyrobených pomocí nanotechnologie můžeme jejich činnost předurčit polohou a druhem jednotlivých atomů, můžeme dosáhnout maximální účinnosti, efektivity a výkonu, při dodržení malých rozměrů. Aktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. |
Inspirací je mikroorganizmus
Trypanosoma brucei je patogenní mikroorganizmus, který způsobuje spavou nemoc. Má chytrý a zákeřný trik, který mu pomáhá pohybovat se uvnitř těla hostitele téměř bez zábran. Dokáže změnit svůj tvar v závislosti na okolním prostředí. Ve fázi života, kterou mikroorganizmus tráví v tělních tekutinách, zaujímá dlouhý a velmi úzký tvar. K pohybu dopředu mu slouží bičík připomínající ocas, který rotuje jako vývrtka. V jiných fázích života, kdy mikroorganizmus nepotřebuje takovou pohyblivost, se smrští do hrudky. Pro Bradleyho Nilsona, inženýra z curyšského ETHETH – prestižní švýcarská polytechnika, na které působil mj. Albert Einstein. Zkratka ETH znamená Eidgenössische Technische Hochschule (Spolková vysoká technická škola). Univerzita byla založena v roce 1855, nyní má dvě části: v Curychu (ETHZ) a v Laussane (ETHL). S univerzitou je spojeno 26 nositelů Nobelových cen., byla schopnost Trypanosomy brucei měnit svůj tvar nejen velkým překvapením, ale také zdrojem inspirace.

Africká Trypanosoma. Zdroj: Infectious Diseases Hub.
Flexibilita
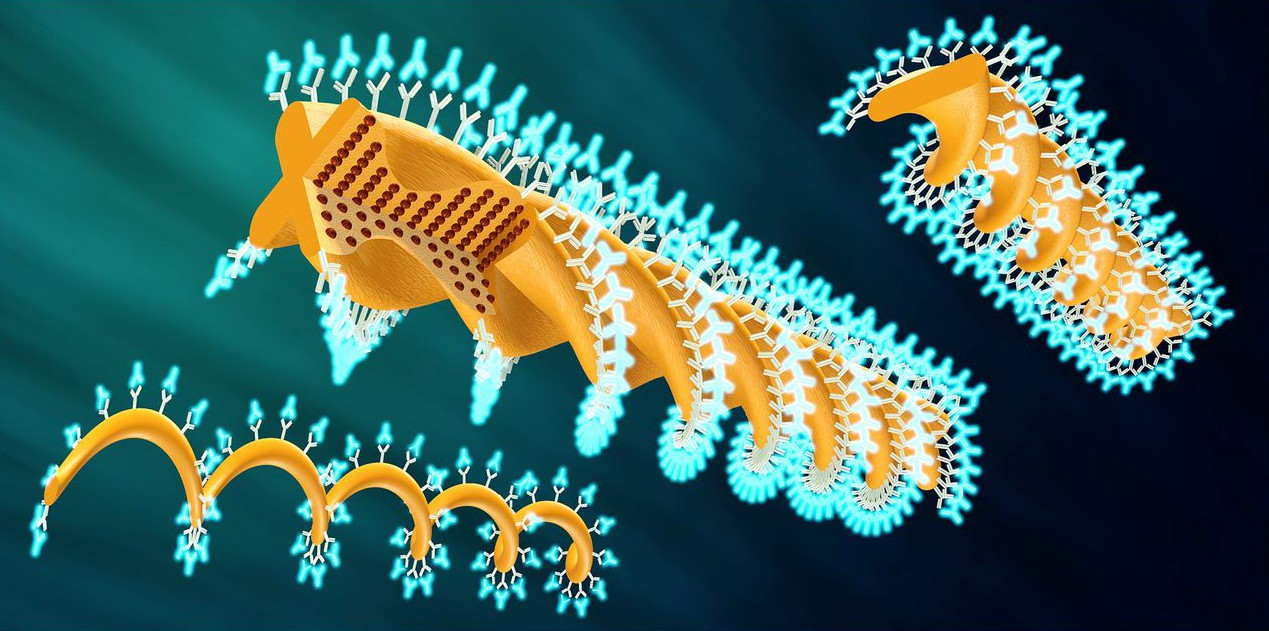
Skupina vědců, vedená Selmanem Sakarem z EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. a Bradleym Nelsonem z ETHETH – prestižní švýcarská polytechnika, na které působil mj. Albert Einstein. Zkratka ETH znamená Eidgenössische Technische Hochschule (Spolková vysoká technická škola). Univerzita byla založena v roce 1855, nyní má dvě části: v Curychu (ETHZ) a v Laussane (ETHL). S univerzitou je spojeno 26 nositelů Nobelových cen., se inspirovala africkou Trypanosomou a navrhla inteligentní a biokompatibilní mikroroboty, kteří jsou vysoce flexibilní. Tato zařízení jsou schopná plavat v tekutinách a v případě potřeby měnit svůj tvar. Mohou projít úzkými cévami a složitými systémy, aniž by to mělo dopad na jejich rychlost a schopnost manévrování. Roboti budou vyrobeni z hydrogelových nanokompozitů, které obsahují magnetické nanočástice a díky tomu půjde tato zařízení ovládat elektromagnetickým polem. Vědci vytvořili studii, v níž řeší, jak „naprogramovat“ tvar robota tak, aby mohl snadno procházet kapalinami, které jsou husté, viskózní a pohybují se různou rychlostí.
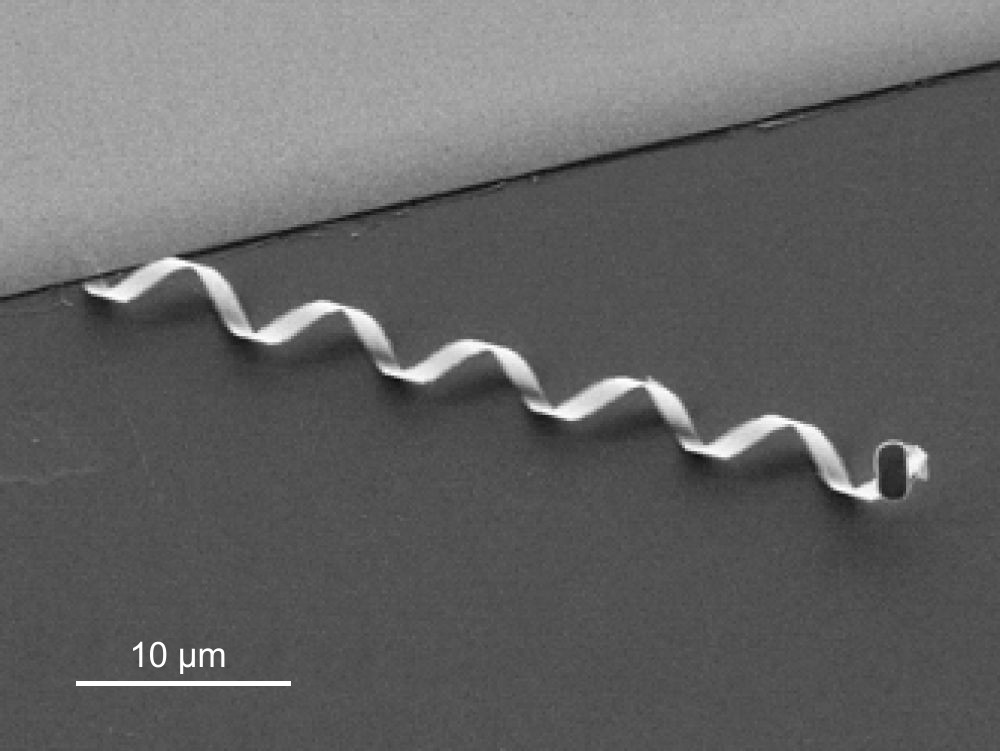
Bičík umělého mikroorganizmu má délku rovnou přibližně polovině tloušťky lidského vlasu. Může plout rychlostí jedné délky svého těla za sekundu. Svým reálným vzorům se velmi podobá. Zdroj: Science Daily.
Integrovaná inteligence
Co se nám vybaví pod pojmem robot? Většinou nás napadne nějaký objemný stroj vybavený komplexními systémy elektroniky, snímači, bateriemi a aktuátoryAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován.. V mikroskopickém měřítku je tomu ale úplně jinak. Výroba miniaturních robotů představuje řadu výzev a neotřelých řešení. Vědce oslovila i metoda založená na japonském origami. Roboti mají zvláštní složení a strukturu, která jim umožní přizpůsobit se vlastnostem tekutiny, kterou procházejí. Pokud se například ocitnou v prostředí s odlišnou viskozitou nebo koncentrací osmoticky aktivních látek, upraví svůj tvar tak, aby i nadále zůstal jejich pohyb pod kontrolou a co možná nejméně se změnila jejich rychlost a schopnost manévrování.
„Origami robot“ obsahuje samonabíjecí mikromotor vyrobený z hydrogelu, který optimalizuje svůj tvar podle viskozity a teploty prostředí. V řadě experimentů se mikromotor dokázal pohybovat roztokem cukru za pomoci bičíku připomínajícího ocas. Roboti mohou být řízeni elektromagnetickým polem, nebo je jejich pohyb určen interakcí dutin (kavit) s proudící tekutinou. V obou případech se při pohybu automaticky transformují do nejúčinnějšího tvaru. Deformace robotů lze předem „naprogramovat“ tak, aby se maximalizoval výkon bez použití speciálních snímačů nebo akčních členů.
Závěr
Sakar a Nelson navrhují stále menší a menší roboty, kteří mají potenciál zasáhnout do různých oblastí medicíny. Jejich rozměry se pohybují od několika milimetrů až po jednotky mikrometrů. Cílem výzkumu je těmito mikroroboty bezpečně zaplavit tělo hostitele. Tam diagnostikují nebo monitorují v reálném čase různá onemocnění, třeba Alzheimerovu chorobu. Také jsou schopni měřit různé parametry, například hladinu glukózy u osob s cukrovkou. Celý roj mikrorobotů může cíleně léčit zhoubné nádory nebo vykonávat přesné zákroky v oku nebo dokonce v mozku.
Chytří mikroroboti přizpůsobující se okolnímu prostředí. Zdroj: EPFL.
* * *
„Jednoho dne bude naše tělo schopno přijmout malé roboty,
kteří
dopraví léky přímo do nemocné tkáně.“
Odkazy
- Laure-Anne Pessina: Smart microrobots that can adapt to their surroundings; EPFL News, 18 Jan 2019
- Stephen Ornes: Inner Workings – Medical microrobots have potential in surgery, therapy, imaging, and diagnostics, PNAS 114 (47) 12356-12358, 21 Nov 2017
- ETH Zurich: Medical Micro-robots Made As Small As Bacteria; Science Daily, 19 Apr 2009
- Wikipedia: Trypanosoma brucei
- Martha Powell: Human African trypanosomiasis – current treatments and the drug pipeline; Infectious Diseases Hub, 22 Sep 2017
![]()
![]()
